深度强化学习DQN(Deep Q-Learning)
本文最后更新于:August 3, 2021 am
DQN
q-learning存在一个问题,真实情况的state可能无穷多,这样q-table就会无限大,解决这个问题的办法是通过神经网络实现q-table。输入state,输出不同action的q-value。
- q-leaning的执行过程:输出state,根据Q-Table输出不同action的q-value,根据探索利用策略,获取当前状态下采取的动作a.

- DQN的执行过程:输出state,根据Network输出不同action的q-value,根据探索利用策略,获取当前状态下采取的动作a.
## DQN的架构
- 通过记忆库,降低观测序列之间的相关性(强化学习由于state之间的相关性存在稳定性的问题,会极大的改变策略进而改变数据分布,解决的办法是在训练的时候存储当前训练的状态到记忆体M,更新参数的时候随机从M中抽样mini-batch进行更新.M 中存储的数据类型为 <s,a,r,s′>,M有最大长度的限制,以保证更新采用的数据都是最近的数据。)
- 通过Q-target的周期性固定,降低Q-target之间的相关性
基本架构:
随机抽取记忆库中的数据进行学习,打乱了经历之间的相关性,使得神经网络更新更有效率,Fixed Q-targets 使得target_net能够延迟更新参数从而也打乱了相关性。
- DQN中有两个神经网络(NN)一个参数相对固定的网络,我们叫做target-net,用来获取Q-目标(Q-target)的数值, 另外一个叫做eval_net用来获取Q-评估(Q-eval)的数值。
- 我们在训练神经网络参数时用到的损失函数(Loss function),实际上就是q_target 减 q_eval的结果 (loss = q_target- q_eval )。
- 反向传播真正训练的网络是只有一个,就是eval_net。target_net 只做正向传播得到q_target (q_target = r +γ*max Q(s,a)). 其中 Q(s,a)是若干个经过target-net正向传播的结果。
- 训练的数据是从记忆库中随机提取的,记忆库记录着每一个状态下的行动,奖励,和下一个状态的结果(s, a, r, s’)。记忆库的大小有限,当记录满了数据之后,下一个数据会覆盖记忆库中的第一个数据,记忆库就是这样覆盖更新的。
- q_target的网络target_net也会定期更新一下参数,由于target_net和eval_net的结构是一样的。更新q_target网络的参数就是直接将q_eval 的参数复制过来就行了。
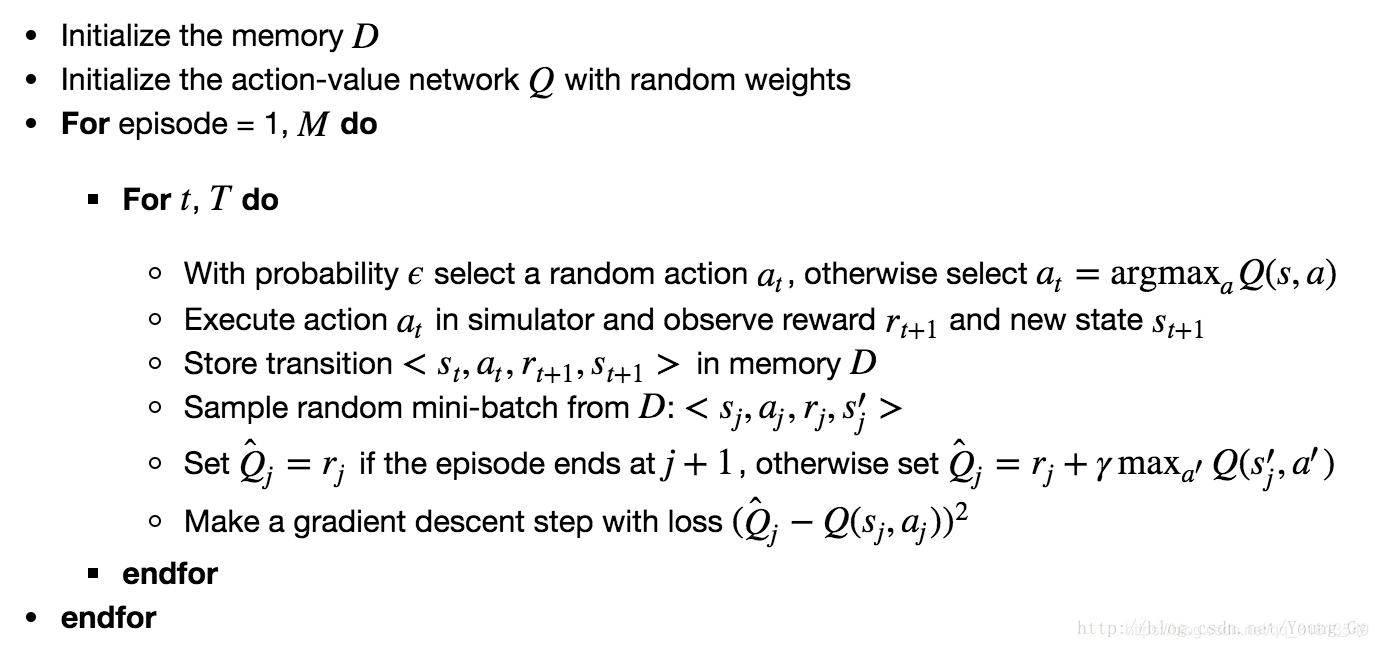
DQN的算法
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221# import lib
import gym
import tensorflow as tf
import numpy as np
# Create the Cart-Pole game environment
env = gym.make('CartPole-v0')
# Q-network
class QNetwork:
def __init__(self, learning_rate=0.01, state_size=4,
action_size=2, hidden_size=10,
name='QNetwork'):
# state inputs to the Q-network
with tf.variable_scope(name):
self.inputs_ = tf.placeholder(tf.float32, [None, state_size], name='inputs')
# One hot encode the actions to later choose the Q-value for the action
self.actions_ = tf.placeholder(tf.int32, [None], name='actions')
one_hot_actions = tf.one_hot(self.actions_, action_size)
# Target Q values for training
self.targetQs_ = tf.placeholder(tf.float32, [None], name='target')
# ReLU hidden layers
self.fc1 = tf.contrib.layers.fully_connected(self.inputs_, hidden_size)
self.fc2 = tf.contrib.layers.fully_connected(self.fc1, hidden_size)
# Linear output layer
self.output = tf.contrib.layers.fully_connected(self.fc2, action_size,
activation_fn=None)
### Train with loss (targetQ - Q)^2
# output has length 2, for two actions. This next line chooses
# one value from output (per row) according to the one-hot encoded actions.
self.Q = tf.reduce_sum(tf.multiply(self.output, one_hot_actions), axis=1)
self.loss = tf.reduce_mean(tf.square(self.targetQs_ - self.Q))
self.opt = tf.train.AdamOptimizer(learning_rate).minimize(self.loss)
# Experience replay
from collections import deque
class Memory():
def __init__(self, max_size = 1000):
self.buffer = deque(maxlen=max_size)
def add(self, experience):
self.buffer.append(experience)
def sample(self, batch_size):
idx = np.random.choice(np.arange(len(self.buffer)),
size=batch_size,
replace=False)
return [self.buffer[ii] for ii in idx]
# hyperparameters
train_episodes = 1000 # max number of episodes to learn from
max_steps = 200 # max steps in an episode
gamma = 0.99 # future reward discount
# Exploration parameters
explore_start = 1.0 # exploration probability at start
explore_stop = 0.01 # minimum exploration probability
decay_rate = 0.0001 # exponential decay rate for exploration prob
# Network parameters
hidden_size = 64 # number of units in each Q-network hidden layer
learning_rate = 0.0001 # Q-network learning rate
# Memory parameters
memory_size = 10000 # memory capacity
batch_size = 20 # experience mini-batch size
pretrain_length = batch_size # number experiences to pretrain the memory
tf.reset_default_graph()
mainQN = QNetwork(name='main', hidden_size=hidden_size, learning_rate=learning_rate)
# Populate the experience memory
# Initialize the simulation
env.reset()
# Take one random step to get the pole and cart moving
state, reward, done, _ = env.step(env.action_space.sample())
memory = Memory(max_size=memory_size)
# Make a bunch of random actions and store the experiences
for ii in range(pretrain_length):
# Uncomment the line below to watch the simulation
# env.render()
# Make a random action
action = env.action_space.sample()
next_state, reward, done, _ = env.step(action)
if done:
# The simulation fails so no next state
next_state = np.zeros(state.shape)
# Add experience to memory
memory.add((state, action, reward, next_state))
# Start new episode
env.reset()
# Take one random step to get the pole and cart moving
state, reward, done, _ = env.step(env.action_space.sample())
else:
# Add experience to memory
memory.add((state, action, reward, next_state))
state = next_state
# Training
# Now train with experiences
saver = tf.train.Saver()
rewards_list = []
with tf.Session() as sess:
# Initialize variables
sess.run(tf.global_variables_initializer())
step = 0
for ep in range(1, train_episodes):
total_reward = 0
t = 0
while t < max_steps:
step += 1
# Uncomment this next line to watch the training
env.render()
# Explore or Exploit
explore_p = explore_stop + (explore_start - explore_stop)*np.exp(-decay_rate*step)
if explore_p > np.random.rand():
# Make a random action
action = env.action_space.sample()
else:
# Get action from Q-network
feed = {mainQN.inputs_: state.reshape((1, *state.shape))}
Qs = sess.run(mainQN.output, feed_dict=feed)
action = np.argmax(Qs)
# Take action, get new state and reward
next_state, reward, done, _ = env.step(action)
total_reward += reward
if done:
# the episode ends so no next state
next_state = np.zeros(state.shape)
t = max_steps
print('Episode: {}'.format(ep),
'Total reward: {}'.format(total_reward),
'Training loss: {:.4f}'.format(loss),
'Explore P: {:.4f}'.format(explore_p))
rewards_list.append((ep, total_reward))
# Add experience to memory
memory.add((state, action, reward, next_state))
# Start new episode
env.reset()
# Take one random step to get the pole and cart moving
state, reward, done, _ = env.step(env.action_space.sample())
else:
# Add experience to memory
memory.add((state, action, reward, next_state))
state = next_state
t += 1
# Sample mini-batch from memory
batch = memory.sample(batch_size)
states = np.array([each[0] for each in batch])
actions = np.array([each[1] for each in batch])
rewards = np.array([each[2] for each in batch])
next_states = np.array([each[3] for each in batch])
# Train network
target_Qs = sess.run(mainQN.output, feed_dict={mainQN.inputs_: next_states})
# Set target_Qs to 0 for states where episode ends
episode_ends = (next_states == np.zeros(states[0].shape)).all(axis=1)
target_Qs[episode_ends] = (0, 0)
targets = rewards + gamma * np.max(target_Qs, axis=1)
loss, _ = sess.run([mainQN.loss, mainQN.opt],
feed_dict={mainQN.inputs_: states,
mainQN.targetQs_: targets,
mainQN.actions_: actions})
saver.save(sess, "checkpoints/cartpole.ckpt")
# Testing
test_episodes = 10
test_max_steps = 400
env.reset()
with tf.Session() as sess:
saver.restore(sess, tf.train.latest_checkpoint('checkpoints'))
for ep in range(1, test_episodes):
t = 0
while t < test_max_steps:
env.render()
# Get action from Q-network
feed = {mainQN.inputs_: state.reshape((1, *state.shape))}
Qs = sess.run(mainQN.output, feed_dict=feed)
action = np.argmax(Qs)
# Take action, get new state and reward
next_state, reward, done, _ = env.step(action)
if done:
t = test_max_steps
env.reset()
# Take one random step to get the pole and cart moving
state, reward, done, _ = env.step(env.action_space.sample())
else:
state = next_state
t += 1
env.close()
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!
